| Los famosos controladores de LED PR4401 y PR4402 de PREMA gozan de una gran popularidad. Estos pequeños circuitos integrados para convertido...

Elektor Team (2798)
5 € (Membri: GRATIS)
5 € (Membri: GRATIS)
| Cuando en una zona exterior son necesarios sensores de temperatura precisos, un aislamiento galvánico resultaría útil para proteger el circu...
5 € (Membri: GRATIS)
| Como ya sabemos, un LED sólo se puede atenuar a través de la corriente y no de la tensión. Esto ocurre en este caso con un microcontrolador...
5 € (Membri: GRATIS)

| En este caso no se trata de un circuito, sino de un pequeño truco a la hora de viajar: cuando se tiene una cámara digital, se tiene por lo t...
5 € (Membri: GRATIS)
| Si estamos orgullosos de ser los propietarios de un viejo osciloscopio de tubo, puede que estemos interesados en utilizarlo una vez más para...
5 € (Membri: GRATIS)

| Las personas tenemos aficiones. Y la pesca es una afición muy especial. Junto con una caña de pescar, muchos pescadores cuentan con una pequ...
5 € (Membri: GRATIS)
| Cuando no se trata tanto de velocidad sino de precisión, se recomienda echar un vistazo al convertidor analógico- digital de la serie MCP355...
5 € (Membri: GRATIS)
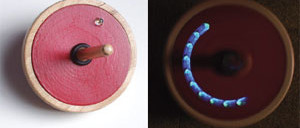
| Un giroscopio con LED de uso comercial fabricado en plástico está compuesto por uno o varios LED, recibe la alimentación de dos pilas de bot...
5 € (Membri: GRATIS)
| La electrónica no tiene por qué estar enmarcada siempre en la teoría ni tomarse en todo momento como algo súper serio. Esto nos lo demuestra...
5 € (Membri: GRATIS)
| En Internet circulan multitud de propuestas de montaje para programadores AVR sencillos que pueden utilizarse en el puerto paralelo del orde...